信息来源:RUC人工智能治理研究院 发布时间:2025年12月23日
机器人有序抓取零件、精准冲泡咖啡的流畅动作背后,一系列高强度、高精度的数据训练正持续运转。技术、数据与现实世界的深度耦合,使人工智能不再停留于屏幕与算法之中,而是以“具身智能”的形式,进入真实生产与生活场景。一场围绕人形机器人技术演进与数据治理问题的深入交流,由此展开。
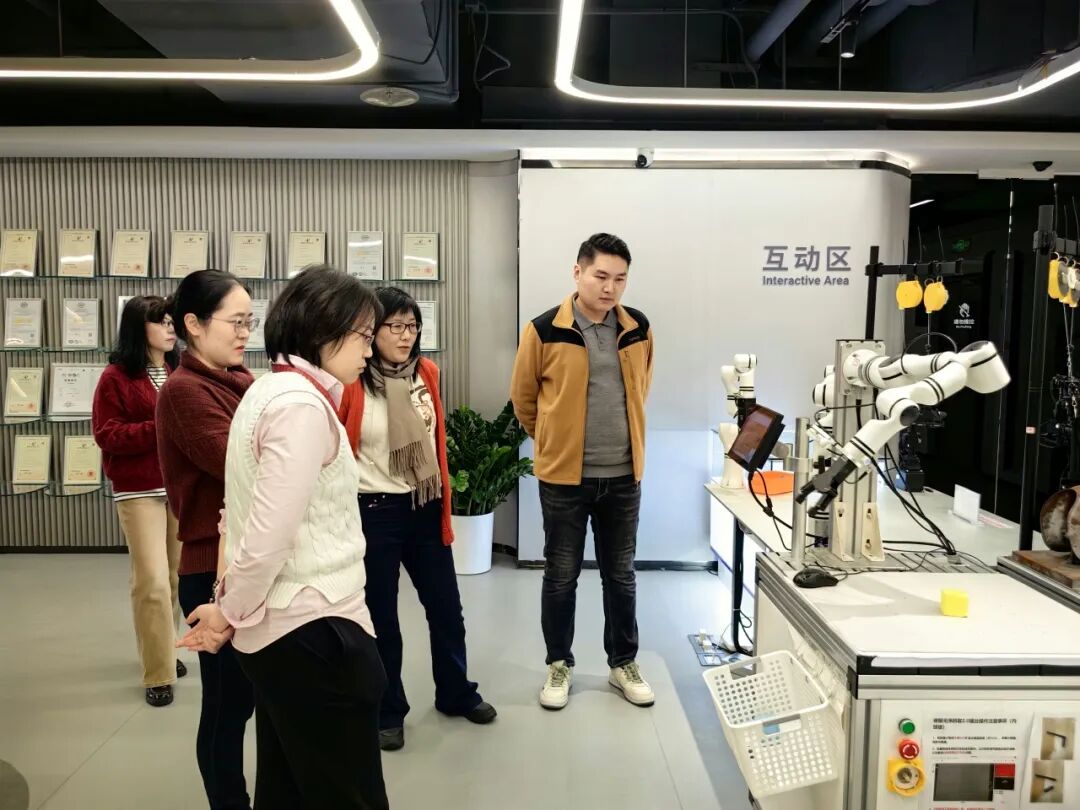
2025年12月16日,中国人民大学人工智能治理研究院团队,赴北京市石景山区首钢园“人形机器人数据训练中心”开展专题考察调研,系统了解我国在人形机器人技术研发、数据采集训练及场景化应用方面的最新进展。本次调研由研究院院长刘玮带队,劳动人事学院李育辉教授、信息资源管理学院王迪副教授、信息学院孙彩虹副教授、法学院孙靖洲博士共同参与。
作为国内首批面向具身智能的大规模数据训练平台之一,人形机器人数据训练中心占地约3000平方米,内部部署108台不同类型的机器人,围绕家庭康养、医疗辅助、特种作业、新零售、物流拣选等十大真实应用场景,持续开展高密度数据采集与模型训练,构建面向复杂现实环境的机器人学习体系。在与训练中心技术支持方——睿尔曼机器人公司团队的深入交流中,调研组系统了解了我国具身智能领域从底层硬件到算法模型、从数据采集到产业落地的整体发展路径。


01
数据训练:从“示教”到“人机对齐”的关键基础设施
在训练中心内,技术人员通过示教机械臂引导目标机械臂重复完成指定动作,系统后台同步记录动作轨迹、关节角度、施力大小、执行时序等多维参数。这一以“人机对齐”为核心的数据采集方式,是当前高精度动作建模与控制算法训练的重要基础。通过对人类操作行为的结构化拆解与参数化记录,系统不断积累高质量训练数据。研究员在现场观察中深刻体会到,具身智能的“智能性”并非源于单一算法突破,而是建立在长期、持续、高质量数据积累之上的系统工程。正是这些看似重复、却高度精细的数据采集过程,支撑着机器人动作从“可执行”向“自然、稳定、安全”演进,也为后续模型泛化与跨场景应用奠定基础。



02
核心技术:超轻量仿人机械臂的自主创新路径
调研过程中,睿尔曼公司重点展示了其在超轻量仿人机械臂领域的技术成果。作为训练中心的主要技术支持方,睿尔曼在减速器、电机、驱动器、控制器等关键环节实现了全链条自主研发,核心零部件国产化率达到100%。不同于传统工业机械臂和协作臂的发展路线,睿尔曼聚焦“超轻量仿人”这一细分方向,提出将机械臂做成人臂粗细、同时保持高负载能力的技术目标。其产品目前已实现负载自重比1:1.44,在同类轻量化产品中处于国际领先水平,并正向更高目标持续攻关。这种以真实应用场景为牵引、以底层技术自主可控为导向的发展路径,为我国具身智能产业构建长期竞争力提供了重要支撑。

03
产业应用:具身智能走向现实生活
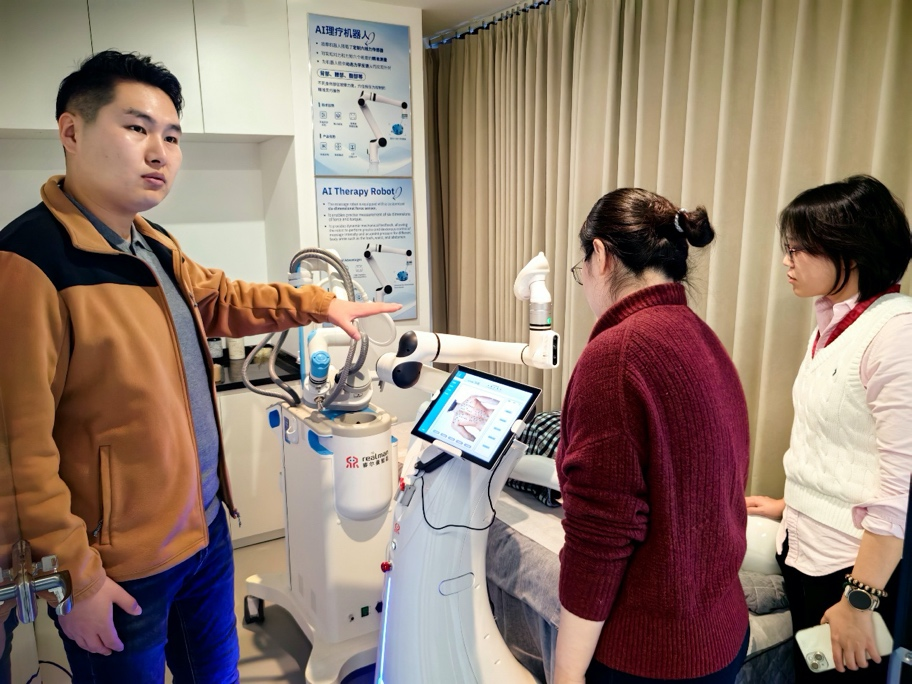
调研团队现场观摩了多项机器人应用示范。在生活服务场景中,机器人咖啡师依靠精细的关节协同与稳定的动作控制,完整完成研磨、冲泡、拉花等流程,展现了具身智能在精细操作领域的成熟度。在医疗康养领域,基于约30万张人体穴位标注数据研发的中医按摩机器人,能够实现高精度定位与标准化操作,在部分指标上已达到甚至超过普通技师水平,体现了人工智能与传统医学场景的深度融合潜力。这些从实验室走向真实场景的示范应用,集中展示了当前具身智能技术从单一技能自动化向多技能自适应组合演进的清晰路径。它们不仅是技术能力的验证,更是未来人机协作社会形态的早期缩影,预示着相关技术正从概念验证迈向规模化落地的前夜。

04
行业瓶颈:数据规模、质量与治理能力的协同挑战
在交流研讨环节,研究员围绕机器人产业发展的关键瓶颈,与技术团队进行了深入探讨。大家认为,数据积累已成为制约具身智能进一步跃升的核心因素。正如自动驾驶依赖海量真实路测数据持续优化算法性能,人形机器人同样需要在数量庞大、类型多样的真实场景中不断“学习”。睿尔曼团队系统介绍了训练中心当前采用的“数据采集—数据集构建—预训练—模型推理—场景迁移”全流程闭环机制,通过持续产生高频实操数据,不断提升模型的稳定性与泛化能力。训练中心目前正与国内外多家头部大模型企业开展合作,探索构建覆盖多场景、多任务的具身智能数据体系。研究院研究员指出,在数据规模持续扩张的同时,如何在数据合规、安全、可控前提下实现高效利用,将成为人工智能治理的重要议题。

05
未来合作:以治理视角推动具身智能高质量发展
在调研交流的最后环节,围绕具身智能的数据采集与应用实践,多位研究员结合自身研究方向提出了具体合作设想。刘玮院长指出,具身智能正加速从实验室走向真实社会,其发展不仅关乎技术突破与产业落地,更深刻影响劳动结构、数据治理体系与人工智能制度设计。李育辉关注人机协作背景下的数据生产过程,提出围绕数据采集员与示教人员开展访谈调研,系统考察人机交互对劳动者工作方式、技能结构与劳动权益的影响,为具身智能发展中的劳动治理提供实证基础。孙彩虹结合具身智能在医疗康养、生活服务等领域的应用实践,提出应进一步拓展真实场景下的应用研究,系统评估具身智能技术嵌入公共生活的现实路径。王迪从产业发展视角出发,重点关注高质量数据采集在具身智能产业中的基础性作用。围绕数据合规与跨境流动问题,孙靖洲就具身智能领域可能涉及的数据出境合规建设,与技术团队交换了意见。在此基础上,刘玮院长与睿尔曼技术团队一致表示,人工智能治理研究院将与人形机器人数据训练中心及相关企业建立稳定、长期的合作机制,在实践场景中推进治理研究,以研究反哺产业发展。

Copyright ©2016 中国人民大学科学技术发展部 版权所有
地址:北京市海淀区中关村大街59号中国人民大学明德主楼1121B 邮编:100872
电话:010-62513381 传真:010-62514955 电子邮箱: ligongchu@ruc.edu.cn
京公网安备110402430004号